TP 4 : Coder en Java le modèle d'usine robotisée : vue structurelle
Le but de cet exercice est de coder en Java le diagramme de classe que vous avez dessiné lors du TD précédent. Ce diagramme a été produit alors que vous ne disposiez pas encore de toutes les notions et bonnes pratiques de modélisation qui ont été vues en classe par la suite, telles que les classes abstraites et le principe de responsabilité unique par exemple. Ainsi, la traduction du diagramme de classe en Java est également l'occasion d'améliorer votre conception en utilisant ces notions et bonnes pratiques, et de compléter le modèle au besoin.
Comme nous l'avons vu, l'usine robotisée est inspirée du laboratoire de systèmes cyber-physique de l'institut Hasso-Plattner (Figure 1).
Figure 1 : L’usine robotisée du laboratoire de systèmes cyber-physiques de l’institut Hasso-Plattner.
Tel qu'illustré par le plan de la Figure 2, l'usine robotisée est constituée de différentes salles dans lesquelles des machines sont installées. Ces machines sont destinées à effectuer un traitement particulier sur des rondelles produites par l'usine.
A l'intérieur de cette usine, des robots servent à transporter les rondelles produites entre les diverses machines de production. Lorsque nécessaire, ces robots peuvent rejoindre des stations de recharge afin de recharger leurs batteries jusqu'à ce qu'ils aient suffisamment d'énergie pour reprendre leur travail.
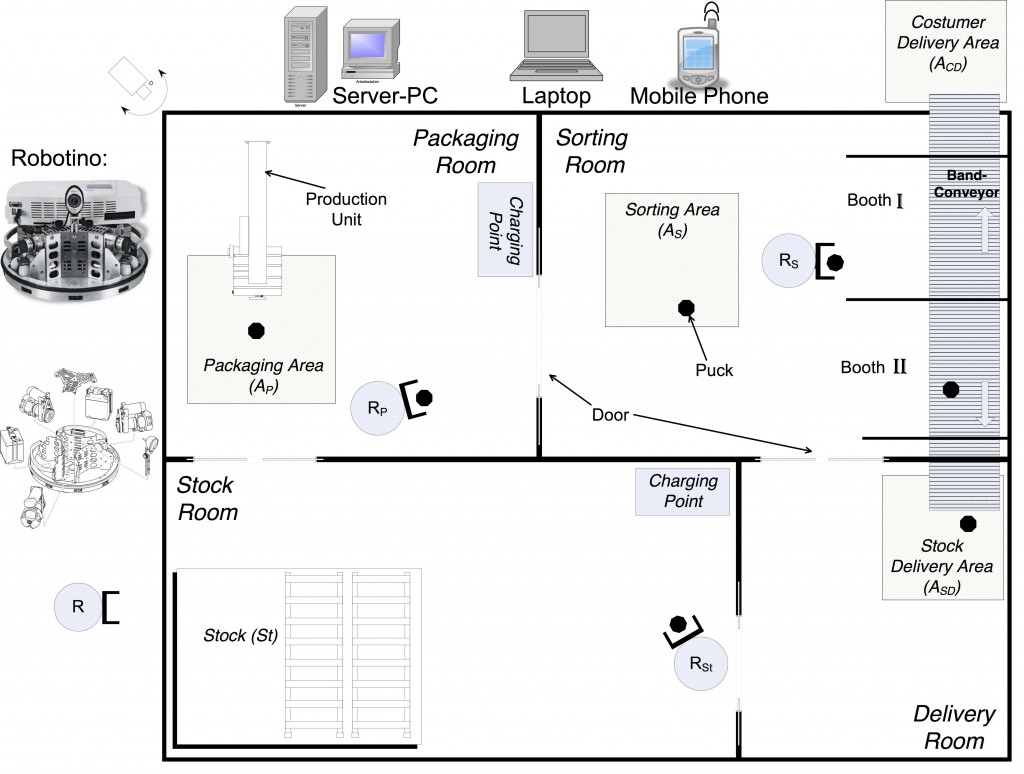
Figure 2 : Plan de l’usine robotisée.
Lors de la conception de systèmes comme une usine robotisée, la simulation est très utile pour évaluer différentes propriétés telles que la quantité de biens pouvant être produits par unité de temps, la quantité de robots nécessaires pour transporter les biens d'une machine à l'autre, ou la capacité des batteries des robots requise pour produire cette quantité de biens, afin d'éviter que les robots ne passent trop de temps en station de recharge.
Le but du simulateur que vous allez développer pour ce projet sera de visualiser le comportement de l'usine robotisée, c'est-à-dire de visualiser différents événements tels que le déplacement des robots transportant des rondelles dans le bâtiment, et l'ouverture de portes automatiques, permettant si le temps le permet de faire quelques estimations grossières de consommation énergétique des robots. Ces derniers aspects seront vus lors de TP ultérieurs.
Les constituants du système
Nous allons d'abord modéliser les constituants de l'usine robotisée. Elle se compose de différents types de composants tels que :
- Une usine.
- Ses salles et portes contenant des aires de production.
- Des machines de production positionnées dans les aires de production.
- Des robots.
- Des stations de recharge de robots.
- Des convoyeurs.
- Des rondelles produites par l'usine.
Créer une classe composant
Nous allons considérer que tous ces objets sont des composants de l'usine et que nous souhaitons représenter leur position dans l'usine en ne considérant que leurs coordonnées cartésienne (position x et y) dans le plan constitué par le sol du bâtiment.
Créer une première classe nommée Component qui définira des attributs communs à tous les composants de l'usine tels que leur position sur le sol de l'usine et leur dimension. Au besoin, créer des classes pour ces différents aspects.
La classe Robot que vous avez créée lors des TP précédents devra être modifiée afin d'hériter de cette classe Component. Par ailleurs, modifier également la classe Factory afin qu'elle possède une liste de composants au lieu d'une liste de robots. Modifier également la méthode addRobot() et la renommer en addComponent(). Cette méthode prendra en paramètre un objet de type Component au lieu d'un nom de robot, et elle ajoutera ce composant à la liste de composants de la classe Factory. Elle devra vérifier que le nom du composant passé en paramètre est unique parmi tous les noms des composants de l'usine.
Modéliser les différents types de composants du système
En utilisant la notion d'héritage de classe vue en cours, créer des classes pour chacun des différents types de composants de l'usine. Ajouter les attributs que vous pensez utiles pour ces différentes classes.
Redéfinir la méthode d'affichage des nouvelles classes
Redéfinir la méthode toString() de chaque nouvelle classe afin de personnaliser son affichage à la console.
Instancier une usine robotisée et l'afficher à la console
Afin de tester votre modèle, créer une classe test contenant une méthode main. Dans cette méthode, instancier une usine robotisée contenant 3 salles ayant chacune une aire de travail, contenant chacune une machine de production. Y ajouter 3 robots et une station de recharge.
Afficher cette usine à la console et vérifier que sa représentation sous forme de chaîne de caractère est correcte.